Section: New Results
Feature space modeling
Participants : Vera Bakic, Nozha Boujemaa, Esma Elghoul, Hervé Goëau, Sofiene Mouine, Olfa Mzoughi, Anne Verroust-Blondet, Itheri Yahiaoui.
Spatial relations between salient points on a leaf
Participants : Sofiene Mouine, Itheri Yahiaoui, Anne Verroust-Blondet.
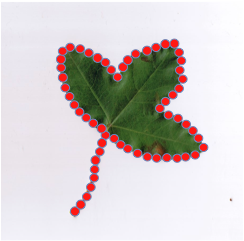
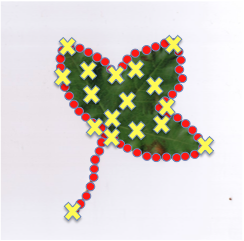
We have introduced a novel method for leaf species identification combining local and shape-based features. Our approach extends the shape context model in two ways:
- First of all, two different sets of points are distinguished when computing the shape contexts: the voting set, i.e. the points used to describe the coarse arrangement of the shape and the computing set containing the points where the shape contexts are computed.
Three shape descriptors are proposed, as illustrated in Figure 1 : SC0 (spatial relations between margin points), which corresponds to the original shape context; SC1 (spatial relations between salient points) where the voting set and the computing set are composed of the salient points of the image and SC2 (spatial relations between salient and margin points) where the voting set contains the margin points and the computing set consists of the salient points (see [11] for more details).
|

-This representation is enriched by introducing local features computed in the neighborhood of the computing points.
We obtained excellent identification scores in the ImageCLEF 2012 plant identification task for scan and scan-like images of leaves (RUN2 in [20] ).
Detection and extraction of leaf parts for plant identification
Participants : Olfa Mzoughi, Itheri Yahiaoui, Nozha Boujemaa.
Automatic plant identification is a relatively new research area in computer vision that has increasingly attracted high interest as a promising solution for the development of many botanical industries and for the success of biodiversity conservation. Most of the approaches proposed are based on the analysis of morphological properties of leaves. They have applied several well-known generic shape descriptors. Nevertheless, faced with the large amount of leaf species, botanical knowledge, especially about leaf parts (petiole, blade, insertion point, base and apex, rachis) is important to enhance their precision.
First of all, in order to extract them from leaf images, we introduced two types of symmetry in [12] : (i) the local translational symmetry, which is useful for petiole and rachis detection and (ii) the local symmetry of depth indentations, which is suited for base and apex detection.
Then, we studied the usefulness of parts detection (mainly petiole and insertion point) as a pre-processing stage for classic leaf shape retrieval schemes [13] . We showed that the removal of the petiole and the use of the insertion point as a starting point for the descriptors sensitive to the starting point improve retrieval results.
Multi-organ plant identification
Participants : Hervé Goëau, Vera Bakic, Souheil Selmi.
Inspired by citizen sciences, the main goal of this work is to speed up the collection and integration of raw botanical observation data, while providing to potential users an easy and efficient access to this botanical knowledge. We therefore designed and developed an original crowd-sourcing web application dedicated to the access of botanical knowledge through automated identification of plant species by visual content with multi-organ queries. Technically, the first side of the application deals with multi-organ content-based identification of plant. Indeed, most methods proposed for such automatic identification are actually based on leaf images, mostly based on leaf segmentation and boundary shape. However, leaves are far from being the only discriminant visual key between species and they are not visible all over the year for a large fraction of plant species. We propose to make the use of five different organs and plant’s views including habit, flowers, fruits, leaves and bark. Thanks to an interactive and visual query widget, the tagging process of the different organs and views is as simple as drag-and-drop operations and does not require any expertise in botany.
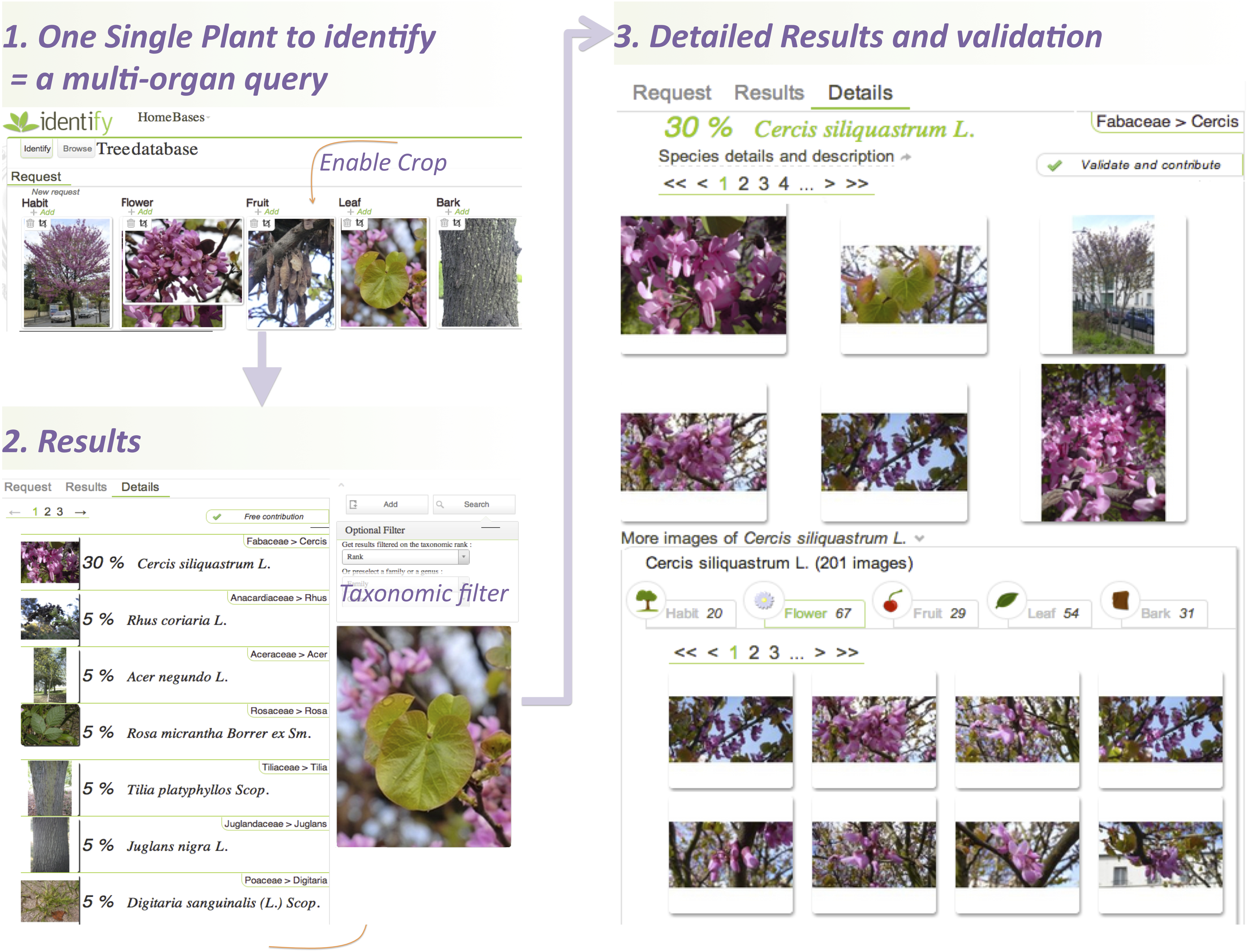
Technically, as suggested by the results of ImageCLEF2011 for leaves [24] , it is based on local features and large-scale matching. Interest points are detected with a modified color Harris detector, in order to favor points with a central position in the image and to reduce the impact of background features. Each interest point is then described with a SURF local feature and an HSV histogram. Automatic system-oriented and human-centered evaluations of the application show that the results are already satisfactory and therefore very promising in the long term to identify a richer flora. The second side of the application deals with interactive tagging and allows any user to validate or correct the automatic determinations returned by the system. Overall, this collaborative system enables the automatic and continuous enrichment of the visual botanical knowledge and therefore it increases progressively the accuracy of the automated identification. This application called ‘Identify’ (cf. Figure 2 and http://identify.plantnet-project.org) has been presented at the first ACM International workshop on Multimedia Analysis and Ecological Data [8] . This work has been done in collaboration with Inria team ZENITH and with the botanists of the AMAP UMR team (CIRAD). It is also closely related to a citizen science project around plant’s identification that we developed with the support of the Tela Botanica social network inside the Pl@ntNet project.
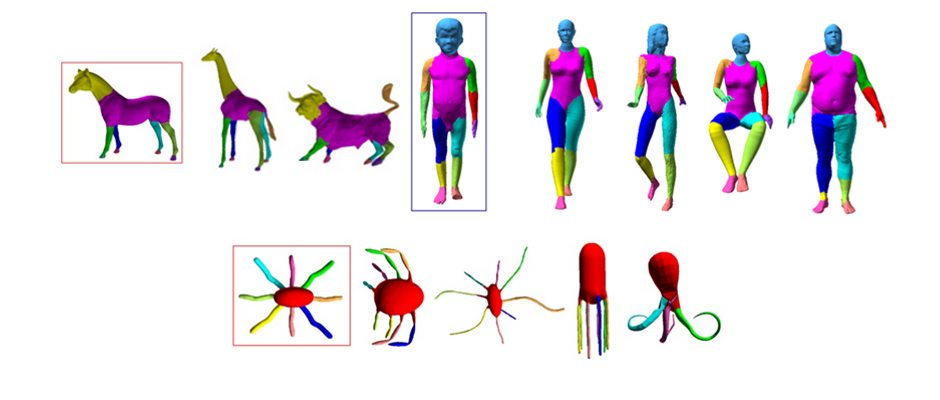
Segmentation transfer method for articulated models
Participants : Esma Elghoul, Anne Verroust-Blondet.
Mesh segmentation consists in partitioning the surface into a set of patches that are uniform with respect to a given property. We are interested in retaining the semantic information during the segmentation. A particularly challenging task is then the automatic identification of semantically meaningful parts of a 3D model, which can be hard to achieve when only the shape geometry is considered. We have introduced a method using a pre-segmented example model to perform semantic-oriented segmentation of non-rigid 3D models of the same class (human, octopus, quadrupeds, etc.). Using the fact that the same type of non-rigid models share the same global topological structure, we exploit coarse topological shape attributes in conjunction with a seed-based segmentation approach to transfer a meaningful and consistent segmentation from the example mesh to the target models. Promising results have been obtained on classes of articulated models (cf. Figure 3 ). This work has been submitted for publication.